Orthogonal Coordinates
 It is
convenient to use orthogonal coordinates, that is axes that are at
right angles to each other. This permits the components along each
axis to be described separately and independently. In this chapter we
use Cartesian coordinates which are orthogonal. In the
Cartesian system a vector is represented by its x and y components.
When we draw the coordinate system (compare picture on the right), we
use to lines drawn perpendicular to each other, that is to say with a
90o angle between them. Conventionally, we label the horizontal
axis with the letter "x" and the vertical axis with the letter
"y".
It is
convenient to use orthogonal coordinates, that is axes that are at
right angles to each other. This permits the components along each
axis to be described separately and independently. In this chapter we
use Cartesian coordinates which are orthogonal. In the
Cartesian system a vector is represented by its x and y components.
When we draw the coordinate system (compare picture on the right), we
use to lines drawn perpendicular to each other, that is to say with a
90o angle between them. Conventionally, we label the horizontal
axis with the letter "x" and the vertical axis with the letter
"y".
Any point in this two-dimensional coordinate system can be
represented by a vector, graphically represented by an arrow pointing
from the origin of the coordinate system, x=0 and y=0, to the point
in space.
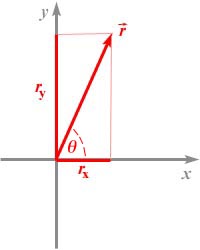
For example the position vector  shown
in the above figure has two components, a component along the x-axis,
rx, and a component along the y-axis, ry. We
can then symbolically express this vector by this pair of
coordinates. We will use the notation shown here, a pair of numbers in
brackets, separated by a comma:
shown
in the above figure has two components, a component along the x-axis,
rx, and a component along the y-axis, ry. We
can then symbolically express this vector by this pair of
coordinates. We will use the notation shown here, a pair of numbers in
brackets, separated by a comma:
=
( rx , ry )
If you now examine the above figure, you will note that
rx and ry form a rectangle, which is divided
into two right triangles by the vector .
The sides of this triangle have lengths rx and
ry, and the hypotenuse is the r-vector. The theorem
of Pythagoras now tells us that:
||
= (rx2 +
ry2)1/2
|| is
the length of the vector, sometimes also simple denoted by r. So you
see that you can figure out the length of the vector by knowing its
x- and y-components.
You will also note in the figure that we have marked the angle
between the x-axis and the r-vector by the symbol q
(Greek letter theta), which we generally use to indicate angles.
More trigonometry will tell you
that:
|
rx
|
= r $\cdot$
cos$\theta$
|
|
ry
|
= r $\cdot$
sin$\theta$
|
|
(This, by the way, is about as much trig as you will need for this
entire chapter and probably for the entire course). This shows that
we can also use the pair of numbers r, the length of the vector, and
$\theta$, its angle relative to the x-axis, to
describe the vector. In fact, this is the representation of the
vector in
polar coordinates, another orthogonal coordinate
system.
Since you can construct the transformation from a representation
of a vector in polar coordinates to one in Cartesian coordinates, it
is also possible to construct the inverse transformation, from
Cartesian to polar:
|
r
|
= (rx2 +
ry2)1/2
|
|
$\theta$
|
= arctan(ry /
rx)
|
|
The upper of these two equations we already obtained above, and
the lower one can then also be obtained with the aid of a little
trigonometry.
The two yellow boxes on this page are the complete transformation
equations between Cartesian and polar coordinates.
This page contains a great deal of new information, and you should
really try to understand the concepts discussed here. Much of the
difficulty that beginning physics students have comes from the lack
of familiarity with the representations of vectors in different
coordinate systems and the transformations between them.
© MultiMedia
Physics, 1999